
هیچ محصولی در سبدخرید نیست.
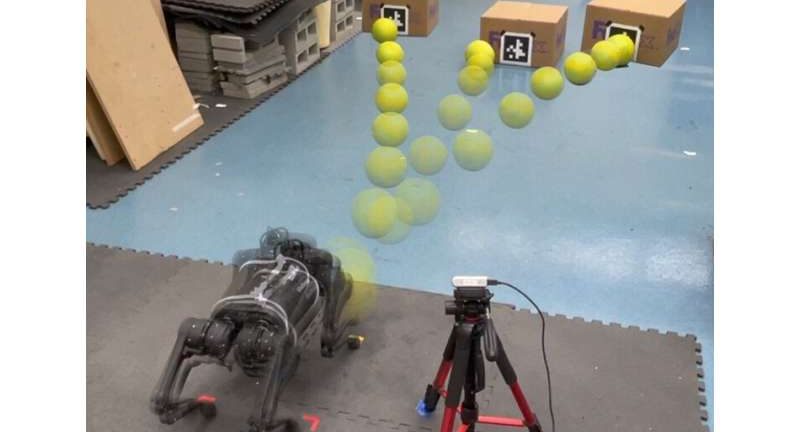
گروهی از محققان سیستم جدیدی را برای بهبود حرکت و دقت در روباتهای چهارپا ایجاد کردهاند که در توانایی این ربات در شلیک توپهای فوتبال به اثبات رسیده است.
محققین؛ از دانشگاه کالیفرنیا، برکلی (UC Berkeley)، دانشگاه مونترال و میلا، از ربات چهارپا A1 که توسط UnitreeRobotics ساخته شده در آزمایشات خود استفاده کرد. برای فعال کردن مهارتهای تیراندازی فوتبال، سیستم روباتیک باید کنترل حرکت و برنامهریزی حرکت را در خود جای میداد و به ربات توانایی درک محیط اطراف و مسیر مورد نیاز برای کسب یک امتیاز را میداد.
چنین سیستمی چالش برانگیز است زیرا ربات نه تنها باید نحوه ضربه زدن به توپ را برای رسیدن به هدف تعیین کند، بلکه باید پای خود را بدون از دست دادن تعادل به صورت فیزیکی بچرخاند. هدف یک توپ فوتبال تغییر شکل پذیر نیز با توجه به تعامل غیرقابل پیش بینی آن با زمین، چالش برانگیز است.
این تیم از یک مدل تقویتی برای آموزش ربات استفاده کرد که ربات هر بار که یک اقدام مورد نظر را با موفقیت انجام می داد، جایزه دریافت می کرد. اصطکاکهای زمین برای آموزش ربات برای حفظ کنترل و دقت در انواع زمینها و شرایط بهصورت تصادفی انجام شد.
این تیم با استفاده از سیستم جدید توسعه یافته خود دریافت که وقتی روی یک ربات چهارپا اعمال می شود، تقریباً هر بار نتایج دقیقی دیده می شود، با این ربات که می تواند یک توپ فوتبال تغییر شکل پذیر را با دقت بالا به اهداف تصادفی شلیک کند.
با حرکت رو به جلو، این تیم گفت که مهارتهای فوتبالی ظریفتر و پیچیدهتری را توسعه خواهد داد، با این امید که روزی ناوگانی از روباتهای مستقل بسازند که قادر به شرکت در یک مسابقه کامل فوتبال بدون دخالت انسان باشند.
این تیم همچنین گفت که این سیستم میتواند در رباتهایی که در فعالیتهایی که شامل اقلام قابل تغییر شکل هستند، مانند لباسها و طنابها – به عنوان مثال روباتهایی که در مأموریتهای جستجو و نجات استفاده میشوند، استفاده شود.
پایان .
لینک منبع : https://www.iotworldtoday.com/2022/08/24/quadruped-robot-hones-soccer-shooting-skills